
日本科学未来館は、視覚障がい者や移動が困難な人々のための支援を目指し、新たな人工知能(AI)技術を搭載したスーツケース型ロボットを開発しました。このプロジェクトは、同未来館と技術企業である「クフウシヤ」の協力によって実現されました。開発されたスーツケース型ロボットは、2025年の大阪・関西万博での実証実験を予定しており、視覚障がい者がより安全かつスムーズに移動できるようサポートすることを目的としています。
参考文献
日本科学未来館で「AIスーツケース」を体験してきた 自動運転の最新技術で視覚障がい者の移動を支援 ネックスピーカーと連動
視覚障害者の移動に新たな選択肢を。「AIスーツケース」でバリアフリー歩行を目指す
視覚障害者向けナビゲーションロボット「AIスーツケース」 国内空港初の実証実験を新千歳空港で実施
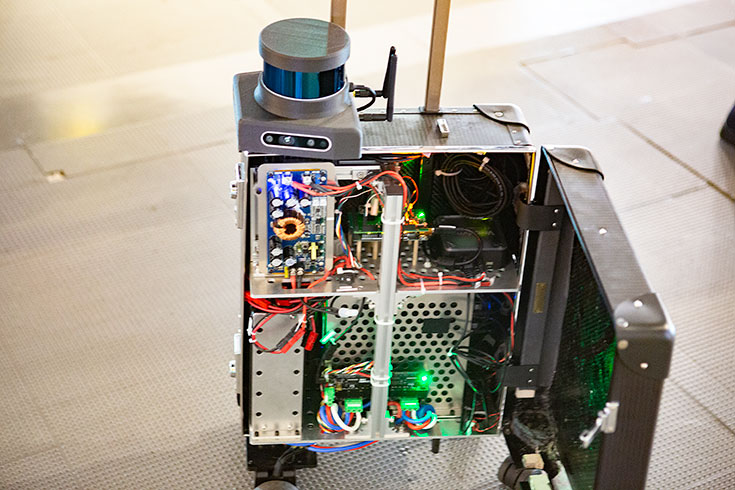
AIスーツケースの特徴と技術

このスーツケース型ロボットは、最新の人工知能技術と複数のセンサーを組み合わせた自律型ナビゲーションシステムを搭載しています。スーツケースに内蔵されている技術は以下の通りです:
- 高度なAIナビゲーション
搭載されたAIが目的地を正確に認識し、利用者を誘導します。障害物や周囲の環境をリアルタイムでスキャンし、安全なルートを計算する仕組みです。 - 高性能センサーとカメラ
スーツケースには複数のセンサーとカメラが装備されており、周囲の地形や物体を検知して利用者が障害物にぶつからないように誘導します。これにより、階段やエスカレーター、交差点などの複雑な環境でもスムーズな移動が可能になります。 - GPSシステム
内蔵されたGPSを使用して現在地を特定し、目的地までの最短ルートを案内します。これにより、慣れない場所や海外旅行時でも利用が可能です。 - 携帯性と実用性
飛行機の機内に持ち込めるサイズで設計されており、持ち運びや収納も便利です。また、重量バランスの調整が行われ、使いやすさが向上しています。 - ユーザーインターフェース
スマートフォンアプリや音声認識機能を通じてスーツケースと通信可能です。利用者は目的地を音声やテキストで入力し、リアルタイムでのナビゲーションを受け取ることができます。
利用シーンと社会的意義

このスーツケース型ロボットは、特に視覚障がい者の移動支援を意識して設計されていますが、高齢者や一時的に移動が困難な人々にも利用できるよう汎用性が高い設計になっています。以下のような場面で活用が期待されています。
- 空港や駅などの大規模な公共施設での移動支援。
- 都市部の複雑な道路環境での案内。
- イベント会場や観光地での道案内。
この技術は、移動に困難を抱える人々が自立して行動する機会を増やし、社会全体のアクセシビリティ向上に寄与することが期待されています。
大阪・関西万博での実証実験

2025年に開催される大阪・関西万博では、このスーツケース型ロボットが来場者の案内や誘導に利用される予定です。万博は国際的な注目を集める場であり、この技術の実用性を世界にアピールする絶好の機会となります。特に、日本の高い技術力と社会的配慮を反映したプロジェクトとして評価が期待されています。
今後の展望と課題
日本科学未来館は、このプロジェクトを通じて社会的な移動のバリアを取り除き、すべての人が快適に移動できる未来を目指しています。ただし、以下の課題も指摘されています
- コストの問題
AIスーツケースは高性能である一方、開発費や製造コストが高いため、一般消費者に普及するためにはコストダウンが必要です。 - バッテリー寿命
長時間の使用に耐えうるバッテリーの開発が課題となっています。 - 法規制の調整
公共の場でのロボット使用に関する法規制や安全基準の確立が必要です。
新型AIスーツケースの開発は、日本が抱える少子高齢化や障がい者支援の課題に対する新たなソリューションを示しています。このプロジェクトは、テクノロジーと社会福祉の融合を実現し、多様な人々が活躍できる社会を作るための重要なステップとなるでしょう。


コメント